
By Sean Fenske, Editor-in-Chief
Orthopedic surgeries faced postponements in 2020 and 2021, demonstrating how important it is to have things going smoothly when they are scheduled. The last thing anyone wants to hear is a surgery delayed due to instrumentation concerns. When it comes to orthopedic surgeries, that instrumentation is likely to include power tools. These sophisticated devices must provide the proper torque, speed, and capabilities to help ensure a successful surgical outcome.
Due to the complexities that surround the use of surgical power tools—sterilization, reliability, ergonomics, versatility, and many other factors—manufacturers of these devices need to be sure the motor and motion control systems are up to the task. As such, the suppliers of these sub-assemblies need to ensure they are well versed on the various aspects most important to both the OEMs incorporating them and the surgeons using them.
To highlight the numerous considerations that you need to keep in mind, Peter van Beek, Business Development Manager—Medical at maxon Group took time to respond to a number of questions about motors & motion control that drive many of the world’s leading industry’s power tools.
Sean Fenske: What are the major future trends with developing power tools for orthopedic surgery and what are the latest demands from OEMs?
Peter van Beek: There are several trends we are seeing in this industry.
OEMs want more customization of not only the drive assembly but also adding contract manufacturing which results in a delivered complete sub-assembly mechanism.
The trend continues of OEMs using a single driver (pen or pistol grip) combined with multiple tool attachment heads to create a complete solution for a specific surgery type. Automatic electronic recognition is required between the drive assembly and the compatible attachment heads. This identification, in turn, regulates the drive assembly speed range and maximum torque outputs of the attached saw, drill, oscillating tool, etc.
Industry is continually demanding higher power density, which in turn is pushing the motor assemblies to be smaller and higher performance. Additionally, temperature management or effective cooling techniques is critical, so the handheld tool is not getting too hot in the hand of the surgeon.
In some cases, a sensorless motor is desirable to reduce risk of failure associated with required cleaning activities between uses. A sensorless brushless motor functions without hall sensors, electronic elements which commonly fail due to cleaning. Similarly, there is a need for drive assemblies that are saline and high PH-chemistry (cleaning agents) tolerant, dishwasher safe, and autoclavable up to several thousand cycles.
Utilizing a motor with a hollow shaft allows the debris and associated fluids to be removed through the motor itself. If the waste stream goes through the motor, the entire handheld tool ultimately becomes smaller in diameter and more ergonomic. The fluid can also provide a cooling benefit to both the motor (which allows higher power output) and the handheld device itself.
With more female doctors performing surgery, tool makers have been pushed to make tools for different hand sizes. Another trend is concentration on smaller joint replacement surgeries (for example, a finger joint) which demand smaller tools and related drive assemblies. We are also collaborating on active implants consisting of small diameter motorized linear actuators (bone extension applications). Finally, we’re providing solutions for surgical robots that offer guidance positioning of surgical power tools to ensure avoidance of forbidden zones during surgery.
Fenske: What are the different types of power tools used in medtech and can you explain how the motion control differs between them?
van Beek: There are many different types of power tools. Each tool type requires a unique cutting speed range and torque. Battery-powered tools would typically run at lower voltages and demand high efficiency.
These tools consist of the following:
Motor assemblies exposed to body fluids require the ability to withstand pre-cleaning, saline exposure, and autoclave between uses.
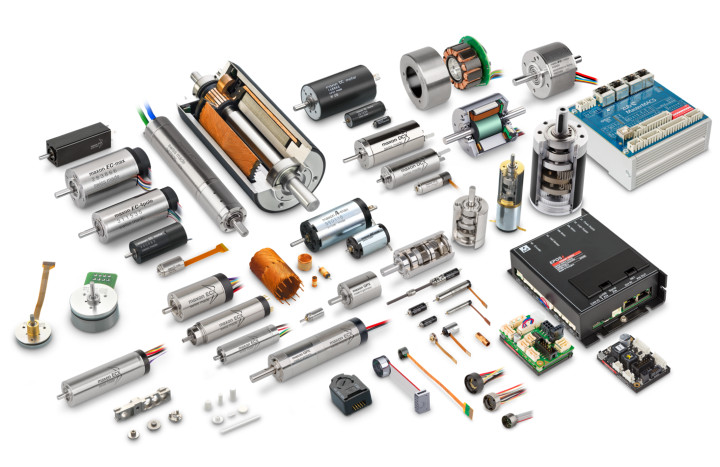
maxon combines brushed and brushless DC motors, gearheads, sensors, and controllers into complete mechatronic drive systems—from customized single units to mass production.
Fenske: What aspects of the device need to be considered beyond the motor and motion control elements?
van Beek: The critical factors outside the drive assembly can be numerous and resemble most medical device projects. Upfront, the design, process, and supplier change controls need to be considered. The regulatory pathway, whether MDR or FDA or both, needs to be analyzed. In addition, the best route for validation and clinical studies needs to be determined. Other aspects would be safety, risk management and mitigation, functionality, human factors and usability, market acceptance, and ease of adaption.
Fenske: What about powering the surgical tool? Does the wireless aspect of the device increase the development challenge?
van Beek: Absolutely. Battery powered devices are more complex to develop. There are several considerations and questions that need to be addressed. In terms of safety, with no power cord, how is the “on” state of the tool confirmed? How are speed monitoring, torque control and sensing, data collection, etc., handled? Continual checks by the control architecture must be made to confirm the tool is functioning as intended.
When using battery powered tools, the position is not known (Bluetooth or other communication approaches need to be determined). In the end, active parameter control is easier with cables versus battery-powered tools.
Fenske: Once the components for a specific power tool are identified, what additional challenges are faced from a contract manufacturing standpoint?
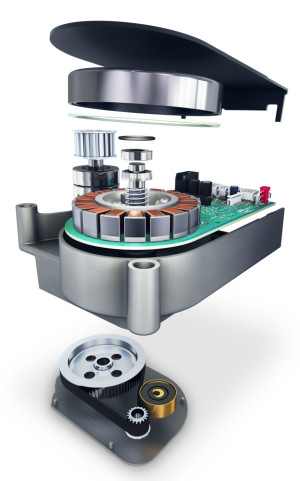
maxon develops customized mechatronic drive systems. DC/BLDC motor, gearhead, sensor, electronics, software, housing—premium quality from a single source.
van Beek: There are still several decisions that need to be made. One is to address supply chain considerations, which are always challenging but even more so during the current COVID pandemic. Contract manufacturers need to confirm the existing supply chain can provide all components required for the build. For some projects, finding a new supply source will be necessary; time must then be built into the schedule for qualifying the supplier. Firms need to keep in mind delivery issues can be difficult—again, especially with electronics currently.
In house, contract manufacturers have several other considerations, such as the product process design and contamination control (e.g., cleanroom, surface contamination, cleaning processes, etc.). Further, end-of-line testing needs to be defined, including set up, qualification, test builds, fixture building, and FMEA studies/review. Upon completion of the first serial production parts a FAIR (first article inspection report) often needs to be performed and sent with the parts.
Fenske: Do you have any additional comments you’d like to share based on any of the topics we discussed or something you’d like to tell orthopedic device manufacturers?
van Beek: maxon is a world-class electric motion control engineering company capable of providing standard catalog, semi-custom, or fully customized servo assemblies or complete mechatronic drive systems. The entire product line is “modular,” which allows one to combine a DC brushed or brushless motor with gearheads, sensors, linear actuators, and drive electronics. Motors range in diameter (from 4 to 90 mm and from 0.5 to 600 W); available gear types include: planetary, spur, bevel, crown, right angle (worm and helical), and harmonic and cycloid; available sensors include: magnetic and optical encoders, tachometers, resolvers, available linear actuator types: threaded and ball screws. Drive electronics include speed/torque and full positional controllers.
When you work with maxon, you will be dealing directly with engineers at the sales, project, and R&D levels. Utilize maxon’s accredited ISO 9001 and 13485 quality standards and deep understanding of FDA and MDR regulatory requirements.
maxon is a global company with eight manufacturing facilities worldwide, facilitating delivery of your final drive assembly anywhere in the world. maxon USA (located in Taunton, MA) offers the U.S. market contract manufacturing services, utilizing Swiss engineering design and process know-how. This can transform your drive assembly into a plug-and-play sub-assembly. Reduce transport costs and time while bringing your product to market faster. This facility has added new capacity lately and is actively looking for new contract manufacturing work.
Finally, maxon does not shy away from cutting edge technologies to solve the impossible drive application, whether it’s a Mars rover or the newest surgical power tool!
Click here to learn more about maxon >>>>>
Orthopedic surgeries faced postponements in 2020 and 2021, demonstrating how important it is to have things going smoothly when they are scheduled. The last thing anyone wants to hear is a surgery delayed due to instrumentation concerns. When it comes to orthopedic surgeries, that instrumentation is likely to include power tools. These sophisticated devices must provide the proper torque, speed, and capabilities to help ensure a successful surgical outcome.
Due to the complexities that surround the use of surgical power tools—sterilization, reliability, ergonomics, versatility, and many other factors—manufacturers of these devices need to be sure the motor and motion control systems are up to the task. As such, the suppliers of these sub-assemblies need to ensure they are well versed on the various aspects most important to both the OEMs incorporating them and the surgeons using them.
To highlight the numerous considerations that you need to keep in mind, Peter van Beek, Business Development Manager—Medical at maxon Group took time to respond to a number of questions about motors & motion control that drive many of the world’s leading industry’s power tools.
Sean Fenske: What are the major future trends with developing power tools for orthopedic surgery and what are the latest demands from OEMs?
Peter van Beek: There are several trends we are seeing in this industry.
OEMs want more customization of not only the drive assembly but also adding contract manufacturing which results in a delivered complete sub-assembly mechanism.
The trend continues of OEMs using a single driver (pen or pistol grip) combined with multiple tool attachment heads to create a complete solution for a specific surgery type. Automatic electronic recognition is required between the drive assembly and the compatible attachment heads. This identification, in turn, regulates the drive assembly speed range and maximum torque outputs of the attached saw, drill, oscillating tool, etc.
Industry is continually demanding higher power density, which in turn is pushing the motor assemblies to be smaller and higher performance. Additionally, temperature management or effective cooling techniques is critical, so the handheld tool is not getting too hot in the hand of the surgeon.
In some cases, a sensorless motor is desirable to reduce risk of failure associated with required cleaning activities between uses. A sensorless brushless motor functions without hall sensors, electronic elements which commonly fail due to cleaning. Similarly, there is a need for drive assemblies that are saline and high PH-chemistry (cleaning agents) tolerant, dishwasher safe, and autoclavable up to several thousand cycles.
Utilizing a motor with a hollow shaft allows the debris and associated fluids to be removed through the motor itself. If the waste stream goes through the motor, the entire handheld tool ultimately becomes smaller in diameter and more ergonomic. The fluid can also provide a cooling benefit to both the motor (which allows higher power output) and the handheld device itself.
With more female doctors performing surgery, tool makers have been pushed to make tools for different hand sizes. Another trend is concentration on smaller joint replacement surgeries (for example, a finger joint) which demand smaller tools and related drive assemblies. We are also collaborating on active implants consisting of small diameter motorized linear actuators (bone extension applications). Finally, we’re providing solutions for surgical robots that offer guidance positioning of surgical power tools to ensure avoidance of forbidden zones during surgery.
Fenske: What are the different types of power tools used in medtech and can you explain how the motion control differs between them?
van Beek: There are many different types of power tools. Each tool type requires a unique cutting speed range and torque. Battery-powered tools would typically run at lower voltages and demand high efficiency.
These tools consist of the following:
- Dental power tools
- Surgical power tools (large bone, small bone, and high speed; wide range of speeds and torque requirements depending upon the attachment head being used)
- ENT (Ear, nose, and throat)
- Cranial and spine tools
- Pin drivers
- Sagittal, oscillating, and reciprocating saws
- Reamers and drills
- Debriders and shavers
- Dermatomes (skin removal)
- Staplers
Motor assemblies exposed to body fluids require the ability to withstand pre-cleaning, saline exposure, and autoclave between uses.
maxon combines brushed and brushless DC motors, gearheads, sensors, and controllers into complete mechatronic drive systems—from customized single units to mass production.
Fenske: What aspects of the device need to be considered beyond the motor and motion control elements?
van Beek: The critical factors outside the drive assembly can be numerous and resemble most medical device projects. Upfront, the design, process, and supplier change controls need to be considered. The regulatory pathway, whether MDR or FDA or both, needs to be analyzed. In addition, the best route for validation and clinical studies needs to be determined. Other aspects would be safety, risk management and mitigation, functionality, human factors and usability, market acceptance, and ease of adaption.
Fenske: What about powering the surgical tool? Does the wireless aspect of the device increase the development challenge?
van Beek: Absolutely. Battery powered devices are more complex to develop. There are several considerations and questions that need to be addressed. In terms of safety, with no power cord, how is the “on” state of the tool confirmed? How are speed monitoring, torque control and sensing, data collection, etc., handled? Continual checks by the control architecture must be made to confirm the tool is functioning as intended.
When using battery powered tools, the position is not known (Bluetooth or other communication approaches need to be determined). In the end, active parameter control is easier with cables versus battery-powered tools.
Fenske: Once the components for a specific power tool are identified, what additional challenges are faced from a contract manufacturing standpoint?
maxon develops customized mechatronic drive systems. DC/BLDC motor, gearhead, sensor, electronics, software, housing—premium quality from a single source.
In house, contract manufacturers have several other considerations, such as the product process design and contamination control (e.g., cleanroom, surface contamination, cleaning processes, etc.). Further, end-of-line testing needs to be defined, including set up, qualification, test builds, fixture building, and FMEA studies/review. Upon completion of the first serial production parts a FAIR (first article inspection report) often needs to be performed and sent with the parts.
Fenske: Do you have any additional comments you’d like to share based on any of the topics we discussed or something you’d like to tell orthopedic device manufacturers?
van Beek: maxon is a world-class electric motion control engineering company capable of providing standard catalog, semi-custom, or fully customized servo assemblies or complete mechatronic drive systems. The entire product line is “modular,” which allows one to combine a DC brushed or brushless motor with gearheads, sensors, linear actuators, and drive electronics. Motors range in diameter (from 4 to 90 mm and from 0.5 to 600 W); available gear types include: planetary, spur, bevel, crown, right angle (worm and helical), and harmonic and cycloid; available sensors include: magnetic and optical encoders, tachometers, resolvers, available linear actuator types: threaded and ball screws. Drive electronics include speed/torque and full positional controllers.
When you work with maxon, you will be dealing directly with engineers at the sales, project, and R&D levels. Utilize maxon’s accredited ISO 9001 and 13485 quality standards and deep understanding of FDA and MDR regulatory requirements.
maxon is a global company with eight manufacturing facilities worldwide, facilitating delivery of your final drive assembly anywhere in the world. maxon USA (located in Taunton, MA) offers the U.S. market contract manufacturing services, utilizing Swiss engineering design and process know-how. This can transform your drive assembly into a plug-and-play sub-assembly. Reduce transport costs and time while bringing your product to market faster. This facility has added new capacity lately and is actively looking for new contract manufacturing work.
Finally, maxon does not shy away from cutting edge technologies to solve the impossible drive application, whether it’s a Mars rover or the newest surgical power tool!
Click here to learn more about maxon >>>>>
