Videos
A Prosthetic Foot for Tough Terrain
A Prosthetic Foot for Tough Terrain
Stanford engineers develop a more stable, efficient prosthetic foot.
By Nathan Collins, Stanford University06.03.19
Taking on a hiking trail or a cobblestone street with a prosthetic leg is a risky proposition—it's possible, but even in relatively easy terrain, people who use prostheses to walk are more likely to fall than others. Now, Stanford University mechanical engineers have developed a more stable prosthetic leg—and a better way of designing them—that could make challenging terrain more manageable for people who have lost a lower leg.
The cornerstone of the new design is a kind of tripod foot that responds to rough terrain by actively shifting pressure between three different contact points. As important as the foot is a tool, the team developed for quickly emulating and improving their prototypes.
"Prosthetic emulators allow us to try lots of different designs without the overhead of new hardware," said Steven Collins, an associate professor of mechanical engineering and a member of Stanford Bio-X. "Basically, we can try any kind of crazy design ideas we might have and see how people respond to them," he said, without having to build each idea separately, an effort that can take months or years for each different design.
Graduate student Vincent Chiu, postdoctoral researcher Alexandra Voloshina and Collins describe the construction and first tests of their prosthetic emulator in a paper published in IEEE Transactions on Biomedical Engineering.
Adjusting to the Terrain
Around half a million people in the United States have lost a lower limb, with effects that go beyond simply making it harder to move around. People with a leg amputation are five times more likely to fall in the course of a year, which may contribute to why they are also less socially engaged. A better prosthetic limb could improve not just mobility but overall quality of life as well.
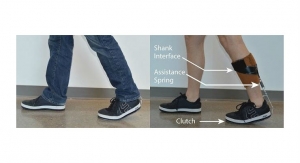
One area of particular interest is making prosthetic limbs that can better handle rough ground. The solution, Chiu, Voloshina and Collins thought, might be a tripod with a rear-facing heel and two forward-facing toes. Outfitted with position sensors and motors, the foot could adjust its orientation to respond to varying terrain, much as someone with an intact foot could move their toes and flex their ankles to compensate while walking over rough ground.
But the engineers knew that perfecting the design would be tough—even with simple designs, a conventional approach can take years or more. "First you have to come up with an idea and then you prototype it and then you make a nice machined version," Chiu said. "It could take several years, and most of the time you find out that it doesn't actually work."
Accelerating Design
Chiu and his team thought they could accelerate the process by developing an emulator, which flips the design process on its head. Rather than building a prosthetic limb someone could test in the real world, the team instead built a basic tripod foot, then hooked it up to powerful off-board motors and computer systems that control how the foot responds as a user moves over all kinds of terrain.
In doing so, the team can put their design focus on how the prosthesis should function—how hard one toe should push off while walking, how springy the heel should be and so forth—without having to worry about how to make the device lightweight and inexpensive at the same time.
So far the team has reported results from work with one participant, a 60-year-old man who lost his leg below the knee due to diabetes, and the early results are promising—making the team hopeful they can take those results and turn them into more capable prosthetics.
"One of the things we're excited to do is translate what we find in the lab into lightweight and low power and therefore inexpensive devices that can be tested outside the lab," Collins said. "And if that goes well, we'd like to help make this a product that people can use in everyday life."
The cornerstone of the new design is a kind of tripod foot that responds to rough terrain by actively shifting pressure between three different contact points. As important as the foot is a tool, the team developed for quickly emulating and improving their prototypes.
"Prosthetic emulators allow us to try lots of different designs without the overhead of new hardware," said Steven Collins, an associate professor of mechanical engineering and a member of Stanford Bio-X. "Basically, we can try any kind of crazy design ideas we might have and see how people respond to them," he said, without having to build each idea separately, an effort that can take months or years for each different design.
Graduate student Vincent Chiu, postdoctoral researcher Alexandra Voloshina and Collins describe the construction and first tests of their prosthetic emulator in a paper published in IEEE Transactions on Biomedical Engineering.
Adjusting to the Terrain
Around half a million people in the United States have lost a lower limb, with effects that go beyond simply making it harder to move around. People with a leg amputation are five times more likely to fall in the course of a year, which may contribute to why they are also less socially engaged. A better prosthetic limb could improve not just mobility but overall quality of life as well.
One area of particular interest is making prosthetic limbs that can better handle rough ground. The solution, Chiu, Voloshina and Collins thought, might be a tripod with a rear-facing heel and two forward-facing toes. Outfitted with position sensors and motors, the foot could adjust its orientation to respond to varying terrain, much as someone with an intact foot could move their toes and flex their ankles to compensate while walking over rough ground.
But the engineers knew that perfecting the design would be tough—even with simple designs, a conventional approach can take years or more. "First you have to come up with an idea and then you prototype it and then you make a nice machined version," Chiu said. "It could take several years, and most of the time you find out that it doesn't actually work."
Accelerating Design
Chiu and his team thought they could accelerate the process by developing an emulator, which flips the design process on its head. Rather than building a prosthetic limb someone could test in the real world, the team instead built a basic tripod foot, then hooked it up to powerful off-board motors and computer systems that control how the foot responds as a user moves over all kinds of terrain.
In doing so, the team can put their design focus on how the prosthesis should function—how hard one toe should push off while walking, how springy the heel should be and so forth—without having to worry about how to make the device lightweight and inexpensive at the same time.
So far the team has reported results from work with one participant, a 60-year-old man who lost his leg below the knee due to diabetes, and the early results are promising—making the team hopeful they can take those results and turn them into more capable prosthetics.
"One of the things we're excited to do is translate what we find in the lab into lightweight and low power and therefore inexpensive devices that can be tested outside the lab," Collins said. "And if that goes well, we'd like to help make this a product that people can use in everyday life."
Related Searches: